|
 |
|
|
|
(c) 2003 Aaron
Banovics rev. 2004 |
|
Teil I - Brushless, was ist das?
|
|
so kurz wie möglich
- so lang wie nötig... |
Brushless -
die Theorie! |
Der erste Teil unserer 4-teiligen Serie über Bürstenlose
Motoren! Viel Unglaubliches hört und liest man über die
"Motoren von Morgen"... Tatsachen oder Gerüchte? Dieser
Artikel wird das klären.Das Modewort "Brushless" bedeutet so viel wie "bürstenlos" so
will sich dieser Motortyp also vom herkömmlich eingesetzten
Bürstenmotor (ja, zum Beispiel der Mabuchi 540 aus dem Tamiya
Baukasten) unterscheiden. Sehen wir uns also die wesentlichen
Punkte beider Motorentypen an: |
|
Bürstenmotor
|
Bürstenloser Motor
|

Kompliziert gebaut ist er, der Rotor
(sich drehender Teil) des Motors. Der Strom muss auf diesen
geleitet werden und durch die Wicklungen fließen um ein
Magnetfeld aufzubauen, wodurch der Motor anläuft (Anziehung -
Abstoßung)Der Kollektor hat dabei eine wichtige
Aufgabe: über ihn wird der Strom von den Anschlusskabeln am
Gehäuse auf die drehende Welle mittels Bürsten (aus relativ
weichem, gut leitenden Material) übergeleitet. Dabei übernimmt
er auch die für die Drehbewegung wichtige Funktion des
Umpolens des Stromes.
Um einen guten Kontakt zwischen
Kollektor und Bürsten zu gewährleisten müssen letztere per
Feder gegen den Kollektor gedrückt werden, und das bedeutet
Reibung (= Leistungsverlust) und Verschleiß
(=Wartung)
|
|

|
Einen völlig anderen Weg geht man beim
bürstenlosen Motor. Hier fließt (vereinfacht ausgedrückt!)
kein Strom über den Rotor!
Deshalb muss gibt es auch keinen
Kollektor, der Rotor des bürstenlosen Motors trägt die
Permanentmagneten, die beim Bürstenmotor im Gehäuse
untergebracht sind, demnach befinden sich die Wicklungen und
Polbleche (= Elektromagnete) vom Rotor des Bürstenmotors im
Gehäuse des Bürstenlosen.
Der Strom fließt hier also - anstatt
den "umständlichen" Weg über den Rotor zu nehmen - durch die
Wicklungen die im Gehäuse untergebracht sind. Die einzige
Reibung, die dem Rotor also widerfährt kommt von den Lagern!
Das mag zwar durch die Einfachheit der
Bauweise genial klingen, wirft aber in der Realisierung einige
Probleme auf!
|
|
| |
| |
| |
|
Das Hauptproblem beim Betrieb eines Bürstenlosen Motors
besteht nun darin, dass die Umpolfunktion des Kollektors
entfällt, aber um einen Elektromotor am Laufen zu halten ist
die Umpolung der Magnetfelder unentbehrlich.
Die Lösung besteht darin, dass der bürstenlose Motor nicht mit
Gleichstrom, sondern mit Drehstrom "befeuert" wird. (Deshalb
auch die 3 Zuleitungskabel an denen man einen Bürstenlosen
erkennt) Drehstrom schaltet die Magnetfelder der Elektromagnete
"automatisch" - durch seine Frequenz - und erzeugt somit
ein drehendes Magnetfeld, welches den Rotor mit konstanter
Geschwindigkeit antreibt. Darum handelt es sich beim
"Bürstenlosen Motor" im Grunde um einen Drehstrommotor - genau
genommen um einen Synchronmotor!
|
Was sagt das Lexikon über den
Lastbetrieb mit einem Synchronmotor aus?
"Ein Synchronmotor ist nicht in
der Lage von selbst anzulaufen. Deshalb benötigt er spezielle
Anlaufhilfen (= Motoren), die ihn auf die Nenndrehzahl
bringen. In Bild 5.19 sehen wir in der Mitte den
Synchronmotor, rechts daneben den Hilfsmotor."
weiters:
"Der Synchronmotor ist
für Lastwechsel ungeeignet da er sofort aus dem Takt käme und
kaum mehr Leistung abgeben könnte."
(mit "Takt" ist die Frequenz des Drehstromes gemeint, die,
bestimmt durch die Anzahl der Pole, die Drehzahl des
Synchronmotors vorgibt.)
|
Und warum kann der Modellbauer damit fahren??
Die Textausschnitte links
hören sich ja nicht besonders optimistisch an, oder?
Trotzdem setzen wir sie
ein; zu Lande, zu Wasser und in der Luft!!
Möglich macht's der
Controller! (=Fahrtenregler)
Die Textausschnitte links setzen voraus, dass der Motor mit
Drehstrom konstanter Frequenz angesteuert wird.
Nun liegt es aber am Controller, blitzschnell auf
Drehzahländerungen zu reagieren und den Motor mit der dazu
passenden Frequenz anzusteuern.
|
| |
| |
| |
|
 |
sensor- vs.
sensorlose Ansteuerung |
|
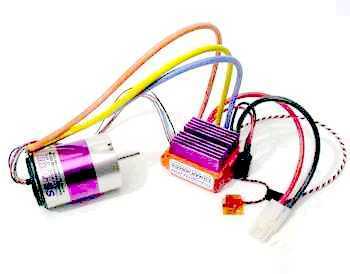
Ein Sensorsystem, wie
z.B. dieses von Novak (Super Sport SS5800) erkennt man an dem dünnen
Kabelstrang, der vom Motor zum Regler geht. Es handelt sich
dabei um die Leitungen der Sensoren im Inneren des Motors.
Weniger Kabel: das sensorlose System (hier Lehner Basic 4200 &
BK-Electronics WARRIOR 9918-3Bec)
Regler und Motor befinden sich hier bereits im einbaufertigen
Zustand in einen Losi XXX, deshalb die etwas eigenwillige
Reglerverpackung. |
Damit der Controller dem
Motor eine "passende" Frequenz vorgeben kann, muss dieser
"wissen" was der Motor gerade tut, sprich wie schnell sich der
Rotor dreht und in welcher Position er sich gerade befindet.
Bei einem
Synchronmotor mit Sensoren erhält der Controller seine
Informationen über Sensoren im Motor.
Man kann also
durchaus sagen, dass die Sensoren die Umpolfunktion des
Kollektors übernehmen - wobei, sie geben ja eigentlich nur das
Signal dazu "im richtigen Moment"
Dadurch ist der Controller immer genauestens informiert, wies
um den Motor bzw. Rotor steht und kann ihn sehr sanft und
genau ansteuern. Somit bieten sensorgesteuerte Motoren viel
Drehmoment "von unten weg" - ähnlich den Bürstenmotoren.
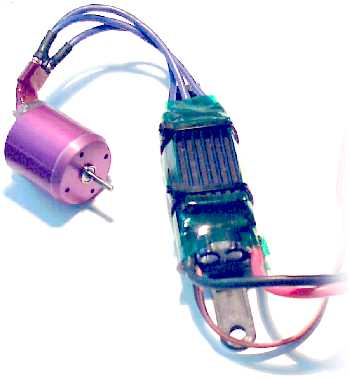
Die "Hardcore
Variante" für den Regler stellt das "sensorlose System dar" !
Die drei Phasenleitungen müssen dem Controller genügen, um den
Motor anzusteuern - und das gelingt mittlerweile schon so gut,
dass derartige Systeme problemlos im RC-Car verwendet werden
können (das Hauptthema dieses Artikels)
Möglich gemacht wird es durch Hochleistungselektronik und
ausgereifte Reglersoftware - doch wie genau das funktioniert,
würde den Umfang dieses kleinen Theorieberichtes sprengen -
Hauptsache es funktioniert! ;)
Ein sensorloser
Controller kann einen Motor mit Sensoren ansteuern, umgekehrt
funktioniert es aber nicht!
Sensorsysteme bringen
von der unteren Drehzahl weg mehr Drehmoment und einen
sanfteren Anlauf, auch ihre Regelbarkeit scheint etwas besser
zu sein. |
| |
| |
| |
|
"Monosegment" vs. "Polysegment": zwei
Arten, einen Rotor zu bauen
|
|
"Segment" bedeutet so
viel wie "Teil", wenn wir von einem "segmentierten Rotor"
sprechen, dann besteht dieser Rotor aus einzelnen Teilen...?
Fast! Im Prinzip kann
der Permanentmagnet des Rotors auf zweierlei Arten aufgebaut
werden:
Als "ein" Magnet, oder aus lauter kleinen Scheibchen, die
voneinander elektrisch isoliert sind.
Die Art des Rotors hat größte Auswirkungen auf den
Wirkungsgrad des Motors im Teillastbereich - da die Controller
den Motor ja getaktet ansteuern, entstehen hier durch das
schnelle "Ein-Aus-Ein-Aus..." mehr oder minder hohe
Wirbelströme, die letzten Endes in Wärmeentwicklung
resultieren.
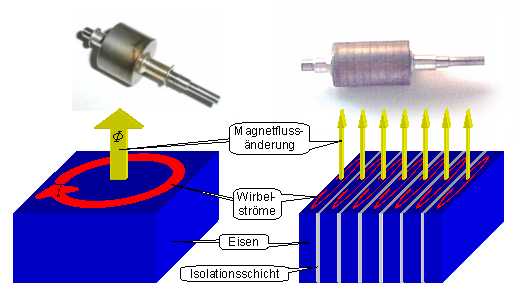
Die Grafik zeigt, ein
Monosegment-Rotor produziert ungleich mehr Wirbelströme als
ein Polysegment-Rotor (links: LMT Basic; rechts LMT 1525 -
10fach segmentiert!)
Durch die dünne elektrische Isolation der einzelnen
Magnetsegmente geht so gut wie nichts von der Magnetmasse
verloren, somit können segmentierte Rotoren dieselben
Leistungen erbringen wie ebenso dimensionierte aber
segmentlose Rotoren.
Der Unterschied vom
Mono zum Polysegment liegt also im Wirkungsgrad im
Teillastbereich (das sollten wir uns als Rc-Car-Fahrer
besonders zu Herzen nehmen!) und im Preis, denn ein
Polysegment-Rotor ist natürlich teurer in der Herstellung.
Anmerkung: Ob es
möglich ist, auch einen Motor ohne Segmentierung effizient im
RC-Car zu betreiben, indem der Controller speziell an den
Motor und an die Fahrbedingungen angepasst wird, werde ich
demnächst testen können - und hier dann ergänzen.
Update: Ja, es ist möglich, näheres dazu
s. Teil 2! |
| |
|
| |
|
top
[Teil I]
Teil II Teil III
Teil IV |
|
|
Fragen? in unserem
FORUM helfen dir die Brushless Experten gerne weiter! |
|
